Getting Started¶
In this section, we will explaine some of the basics of the *CameraTransform* package.Using Cameras¶
The most important object is the :py:class:`~.Camera`. It can be created with different projections (for normal cameras: :py:class:`~.RectilinearProjection` or pamoranic cameras: :py:class:`~.CylindricalProjection`, :py:class:`~.EquirectangularProjection`). We define the camera parameters and create a camera with the rectinilar projection (default pin-hole camera) and the spatial orientation, 10m above ground and looking down 45°. Keep in mind the orientation of the tilt angle, where a 0° tilt angle corresponds to a view perpedicular on the ground plane[1]:
import cameratransform as ct
# intrinsic camera parameters
f = 6.2 # in mm
sensor_size = (6.17, 4.55) # in mm
image_size = (3264, 2448) # in px
# initialize the camera
cam = ct.Camera(ct.RectilinearProjection(focallength_mm=f,
sensor=sensor_size,
image=image_size),
ct.SpatialOrientation(elevation_m=10,
tilt_deg=45))
[2]:
cam.elevation_m = 34.027
cam.tilt_deg = 83.307926
cam.roll_deg = -1.916219
[3]:
cam.imageFromSpace([3.17, 8, 0])
[3]:
array([ 2513.01903033, 10302.79024379])
[4]:
cam.imageFromSpace([[3.17, 8, 0],
[3.17, 8, 10],
[4.12, 10, 0],
[4.12, 10, 10]])
[4]:
array([[ 2513.01903033, 10302.79024379],
[ 2709.93369714, 8257.53176532],
[ 2613.01526893, 8957.64510958],
[ 2788.36057303, 7108.36064027]])
[5]:
cam.spaceFromImage([2445, 1569])
[5]:
array([ 39.04004539, 156.98250489, 0. ])
[6]:
cam.spaceFromImage([2445, 1569], X=10)
[6]:
array([ 10. , 43.4940148 , 24.58546926])
[7]:
%matplotlib inline
import matplotlib.pyplot as plt
# display a top view of the image
im = plt.imread("CameraImage.jpg")
top_im = cam.getTopViewOfImage(im, [-150, 150, 50, 300], scaling=0.5, do_plot=True)
plt.xlabel("x position in m")
plt.ylabel("y position in m");
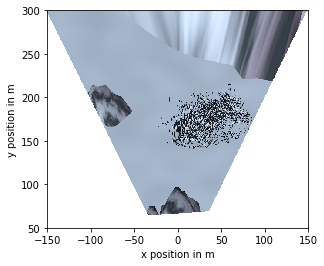
Tip
As CameraTransform cannot detect the occlusions, the top view projection is not a real top view, any extended object will cast a "projection shadow" on everything behind it.
Fitting¶
This section will cover the basics for estimating the camera parameters from information in the image. First we define the camera with a focal length and the image size obtained from a loaded image.[8]:
import CameraTransform as ct
import numpy as np
import matplotlib.pyplot as plt
im = plt.imread("CameraImage2.jpg")
camera = ct.Camera(ct.RectilinearProjection(focallength_px=3863.64, image=im))
[9]:
feet = np.array([[1968.73191418, 2291.89125757], [1650.27266115, 2189.75370951], [1234.42623164, 2300.56639535], [ 927.4853119 , 2098.87724083], [3200.40162013, 1846.79042709], [3385.32781138, 1690.86859965], [2366.55011031, 1446.05084045], [1785.68269333, 1399.83787022], [ 889.30386193, 1508.92532749], [4107.26569943, 2268.17045783], [4271.86353701, 1889.93651518], [4007.93773879, 1615.08452509], [2755.63028039, 1976.00345458], [3356.54352228, 2220.47263494], [ 407.60113016, 1933.74694958], [1192.78987735, 1811.07247163], [1622.31086201, 1707.77946355], [2416.53943619, 1775.68148688], [2056.81514201, 1946.4146027 ], [2945.35225814, 1617.28314118], [1018.41322935, 1499.63957113], [1224.2470045 , 1509.87120351], [1591.81599888, 1532.33339856], [1701.6226147 , 1481.58276189], [1954.61833888, 1405.49985098], [2112.99329583, 1485.54970652], [2523.54106057, 1534.87590467], [2911.95610793, 1448.87104305], [3330.54617013, 1551.64321531], [2418.21276457, 1541.28499777], [1771.1651859 , 1792.70568482], [1859.30409241, 1904.01744759], [2805.02878512, 1881.00463747], [3138.67003071, 1821.05082989], [3355.45215983, 1910.47345815], [ 734.28038607, 1815.69614796], [ 978.36733356, 1896.36507827], [1350.63202232, 1979.38798787], [3650.89052382, 1901.06620751], [3555.47087822, 2332.50027861], [ 865.71688784, 1662.27834394], [1115.89438493, 1664.09341647], [1558.93825646, 1671.02167477], [1783.86089289, 1679.33599881], [2491.01579305, 1707.84219953], [3531.26955813, 1729.08486338], [3539.6318973 , 1776.5766387 ], [4150.36451427, 1840.90968707], [2112.48684812, 1714.78834459], [2234.65444134, 1756.17059266]])
heads = np.array([[1968.45971142, 2238.81171866], [1650.27266115, 2142.33767714], [1233.79698528, 2244.77321846], [ 927.4853119 , 2052.2539967 ], [3199.94718145, 1803.46727222], [3385.32781138, 1662.23146061], [2366.63609066, 1423.52398752], [1785.68269333, 1380.17615549], [ 889.30386193, 1484.13026407], [4107.73533808, 2212.98791584], [4271.86353701, 1852.85753597], [4007.93773879, 1586.36656606], [2755.89171994, 1938.22544024], [3355.91105749, 2162.91833832], [ 407.60113016, 1893.63300333], [1191.97371829, 1777.60995028], [1622.11915337, 1678.63975025], [2416.31761434, 1743.29549618], [2056.67597009, 1910.09072955], [2945.35225814, 1587.22557592], [1018.69818061, 1476.70099517], [1224.55272475, 1490.30510731], [1591.81599888, 1510.72308329], [1701.45016126, 1460.88834824], [1954.734384 , 1385.54008964], [2113.14023137, 1465.41953732], [2523.54106057, 1512.33125811], [2912.08384338, 1428.56110628], [3330.40769371, 1527.40984208], [2418.21276457, 1517.88006678], [1770.94524662, 1761.25436746], [1859.30409241, 1867.88794433], [2804.69006305, 1845.10009734], [3138.33130864, 1788.53351052], [3355.45215983, 1873.21402971], [ 734.49504829, 1780.27688131], [ 978.1022294 , 1853.9484135 ], [1350.32991656, 1938.60371039], [3650.89052382, 1863.97713098], [3556.44897343, 2278.37901052], [ 865.41437575, 1633.53969555], [1115.59187284, 1640.49747358], [1558.06918395, 1647.12218082], [1783.86089289, 1652.74740383], [2491.20950909, 1677.42878081], [3531.11177814, 1696.89774656], [3539.47411732, 1745.49398176], [4150.01023142, 1803.35570469], [2112.84669376, 1684.92115685], [2234.65444134, 1724.86402238]])
camera.addObjectHeightInformation(feet, heads, 0.75, 0.03)
[10]:
horizon = np.array([[418.2195998, 880.253216], [3062.54424509, 820.94125636]])
camera.addHorizonInformation(horizon, uncertainty=10)
[11]:
camera.setGPSpos("66°39'53.4\"S 140°00'34.8\"")
lm_points_px = np.array([[2091.300935, 892.072126], [2935.904577, 824.364956]])
lm_points_gps = ct.gpsFromString([("66°39'56.12862''S 140°01'20.39562''", 13.769),
("66°39'58.73922''S 140°01'09.55709''", 21.143)])
lm_points_space = camera.spaceFromGPS(lm_points_gps)
camera.addLandmarkInformation(lm_points_px, lm_points_space, [3, 3, 5])
[12]:
trace = camera.metropolis([
ct.FitParameter("elevation_m", lower=0, upper=100, value=20),
ct.FitParameter("tilt_deg", lower=0, upper=180, value=80),
ct.FitParameter("heading_deg", lower=-180, upper=180, value=-77),
ct.FitParameter("roll_deg", lower=-180, upper=180, value=0)
], iterations=1e4)
0%| | 38/10000 [00:00<00:26, 371.21it/s]/home/richard/miniconda3/lib/python3.6/site-packages/scipy/stats/_distn_infrastructure.py:876: RuntimeWarning: invalid value encountered in greater_equal
return (self.a <= x) & (x <= self.b)
/home/richard/miniconda3/lib/python3.6/site-packages/scipy/stats/_distn_infrastructure.py:876: RuntimeWarning: invalid value encountered in less_equal
return (self.a <= x) & (x <= self.b)
100%|██████████| 10000/10000 [00:27<00:00, 369.32it/s, acc_rate=0.202, factor=0.0253]
[13]:
camera.plotTrace()
plt.tight_layout()
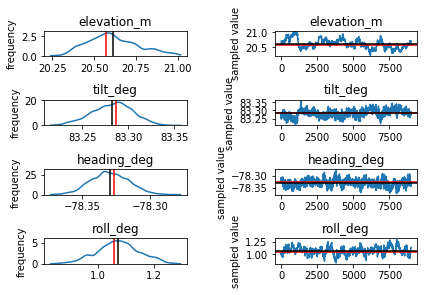
[14]:
camera.plotFitInformation(im)
plt.legend();
